機械手臂自動化產線與智慧製造
機械手臂 (robotic arm) 是具有模仿人類手臂功能並可完成各種作業的自動控制設備。這種自動裝置機械以完成「腕部及手部」的動作為主要訴求,能依樣照作並且反覆完成無數次的正確規律運作,對於改善勞動力並提升生產效率都有很大的幫助。
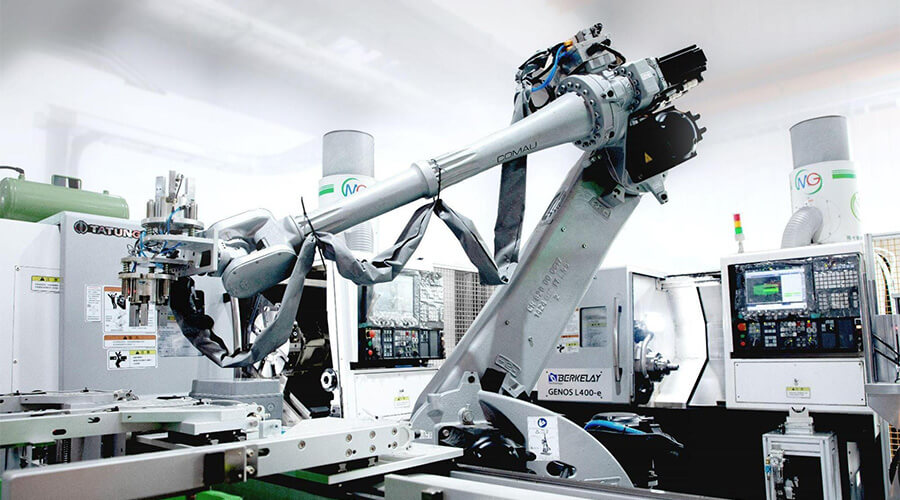
我們在近年導入機械手臂與自動量測,建立智慧車用零組件自動化產線。
在機械手臂的應用實務上,曾遇過並解決以下問題:
- 機械手臂未確實夾持機械手臂會因為氣壓不足、感測元件失效,或是外力與環境等因素,導致無法確實夾持物料。為解決此問題,須藉由機械手臂的程式編寫或感測零組件的調整更換,以達到確實夾持的功能運作。
-
機械手臂夾持損傷 機械手臂因為空間限制以及本身的物理限制,無法徹底有效清除加工的鐵屑殘留,而殘留的鐵屑累積下來,在夾持的過程將會對夾持的工件造成表面損傷。
為改善夾持損傷的問題,我們已加裝外部噴水或吹氣設備,並確保供給量充足,來改善因鐵屑殘留造成的夾持損傷。 - 機械手臂撞機機械手臂在運作中,有可能會因為程式和設備之間信號溝通不協調,導致運作時撞機。為預防撞機發生,首要確認程式和感測零組件之間有和諧搭配,並且持續追蹤改善程式,也可加裝感測器模組,以提高機械手臂在工作時的安全程度。
以上是機械手臂在加工產線的實務應用情境,我們透過加裝感測元件建立防呆機制、加裝外部吹氣設備以改善鐵屑殘留、以及程式優化等步驟,均確實改善機械手臂實務應用上的問題,透過人機協作,使廠內的機械手臂成為生產過程裡的高效率助手。