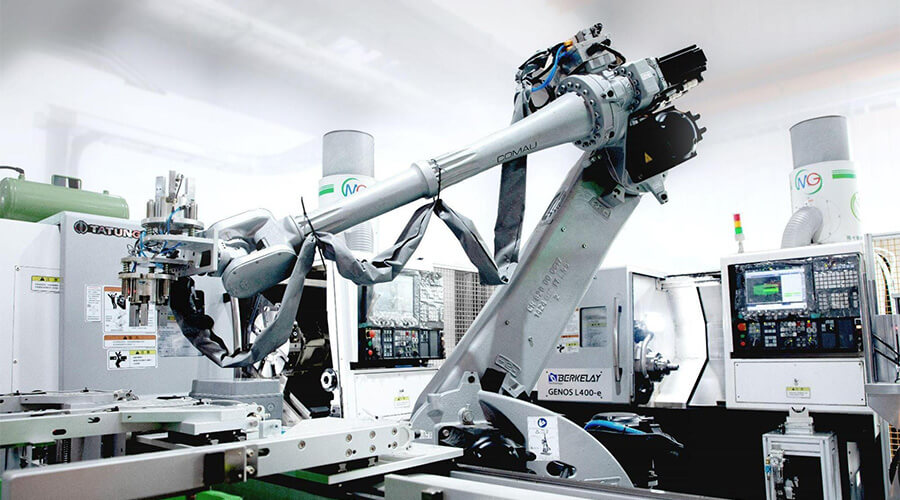
ロボット自動化生産ライン (24時間無人稼働)
ロボットアームは、人間の腕のように機能し、様々なタスクを実行できる自動制御デバイスだ。この自動装置の主な目的は、「腕と手」ような動きを完了することです。 同じ動作を何度でも正確に行うことができ、労働力の向上や生産効率の向上に大きく貢献します。
近年では、ロボットアームや自動測定を導入し、商用車部品の自動生産ラインを構築してきます。
ロボットアームのアプリケーションの実践では、次の問題が発生し、解決されています。
- ロボットアームがしっかりと掴んでいないロボットアームは、不十分な空気圧、センサーの故障、または外力や環境要因により、パーツをしっかりと掴んでいない場合がある。この問題を解決するには、ロボットアームをプログラムするか、センサーを調整や交換して、掴む機能をしっかりと実現する必要がある。
- ロボットアームによる挟み込み被害空間とロボットアーム自体の制限により、切りくずを取り除くことができず、残った切りくずが掴んだ部品に損傷を与える可能性がある。
挟み込み被害を改善するため、外部に散水やエアブロー設備を設置した。その十分な供給量を確保して、切りくずによる挟み込み被害を改善する。 - ロボットアームの衝突ロボットアームの動作中に、プログラムと機器間の信号通信が調整されていないため、プログラムと機器の間で衝突が発生する可能性がある。衝突を防ぐために、まずプログラムとセンサーの間に調和のとれた一致があることを確認し、プログラムの追跡と改善を続ける。センサーモジュールを追加して、作業中のロボットアームの安全性を向上させることもできます。
以上が加工生産ラインにおけるロボットアームの実用化シナリオだ。フールプルーフためセンサー追加、切りくずの残留改善のための外部エアブロー装置の追加、プログラムの最適化など、ロボットアームの実用化における課題を確実に改善した。人と機械のコラボレーションにより、工場のロボットアームは生産プロセスの効率的なアシスタントになる。